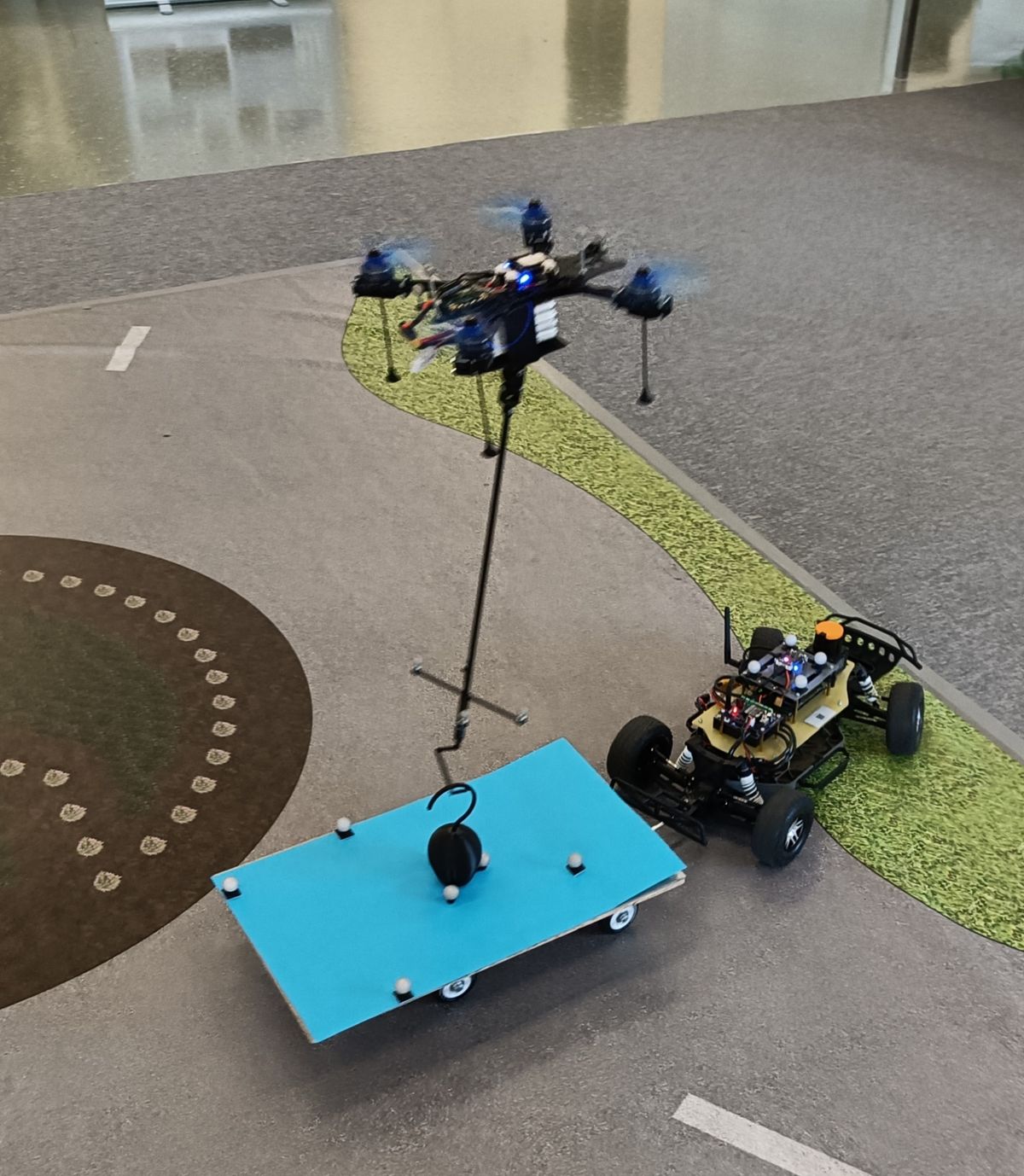
A HUN-REN SZTAKI kutatói által kifejlesztett rendszerrel felszerelt drón képes arra, hogy egy egyszerű horog segítségével önállóan felvegye a csomagot a mozgó járműről, majd egy másik, szintén mozgó járműre kézbesítse – centiméteres pontossággal. A vásári horgászós játékból tudhatjuk: ez még kézi irányítással sem könnyű mutatvány. Emberi vezérlés nélkül, teljesen autonóm drónnal pedig a világon jelenleg csak a magyar laboratóriumban képesek ezt végrehajtani.
Más nemzetközi kísérletek nehezebb és bonyolultabb, aktív megfogó mechanikát, például tűket, elektromágnest vagy markoló kart használnak, míg a mi megoldásunk nem csupán technológiailag egyszerűbb, de energiatakarékosabb is – mondja Tóth Roland, az SCL kutatója. – Ez lehetővé teszi, hogy olcsóbb, kisebb drónok is el tudjanak végezni komplex feladatokat, ráadásul egy horog aránylag könnyen felszerelhető bármely csomagra.
Pizzát azért még ne rendeljünk a drónoktól
Bár a csomagszállító drónokat leggyakrabban városi környezetben képzeljük el, az első, valóban működő rendszerekkel nem a nagyvárosi utcákon találkozunk majd. Ennek egyszerű oka van: a vidéki, ritkán lakott környezet vagy éppen a zárt terek, raktárak sokkal kiszámíthatóbbak.
Néhány országban már elindultak az első olyan szolgáltatások, ahol a drónok gyógyszert, ételt vagy kisebb csomagokat szállítanak, ám ezek jellemzően stabil időjárási viszonyok között, alacsony épületek és egyszerű légiforgalom mellett működnek. Ilyen környezetben nincs szükség nagy pontosságra vagy gyors irányváltásokra.
Ezzel szemben az a fajta irányítás, amely lehetővé teszi, hogy egy drón akár mozgó járművek között is biztonságosan és önállóan kézbesítsen csomagot, még nem része a hétköznapi gyakorlatnak. Az ilyen feladatokhoz szükséges, valós idejű és centiméteres pontosságú mozgásvezérlés az, amiben a HUN-REN SZTAKI kutatóinak munkája világszinten is előremutatónak számít. Ezeknek a fejlesztéseknek pedig az ipari vagy logisztikai létesítmények jelenthetik a legjobb tanulópályát: az ilyen zárt terekben ugyanis nincsenek véletlenszerű mozgások, madarak vagy járókelők, és nem befolyásolja a repülést a szél vagy a köd. Így ideális környezetet biztosítanak a precíziós autonóm repülés fejlesztéséhez, ahol a drónok valódi kihívások között, de ellenőrzött módon bizonyíthatják megbízhatóságukat.




















Szóljon hozzá!
Jelenleg csak a hozzászólások egy kis részét látja. Hozzászóláshoz és a további kommentek megtekintéséhez lépjen be, vagy regisztráljon!